-
![仪表工该怎样维护阀位开关知识分享]()
-
![气动调节阀是如何工作的常见故障处理方法知多少?]()
-
![控制阀控制的精准度是由阀门决定还是由定位器决定?]()
-
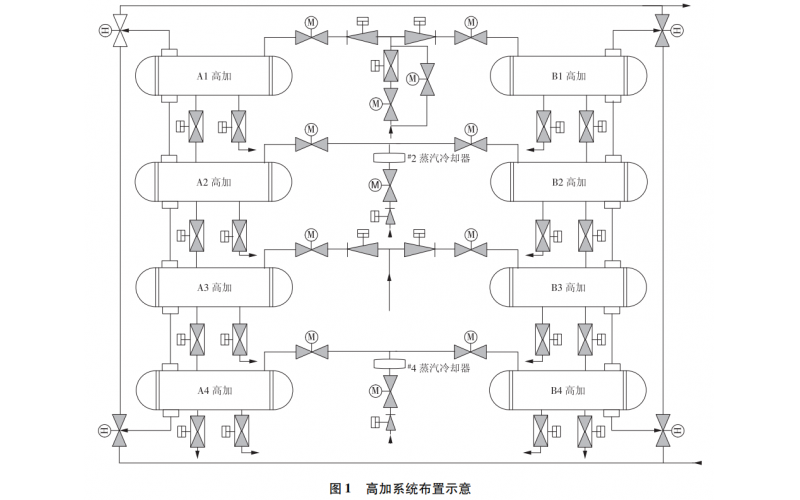
![高加系统液位异常现象分析知识]()
-
![如何正确选型蒸汽管径和阀门?]()
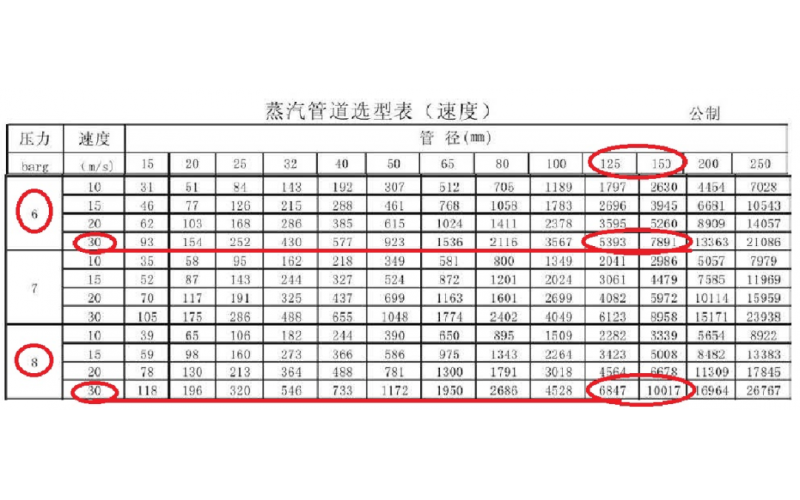
如何正确选型蒸汽管径和阀门?
蒸汽系统输送的目的是把正确的压力,充足的蒸汽量输送至使用点。蒸汽管道和阀门的正确选型,是为了确保用汽设备正常运行,并且满足工艺要求和生产效率。
2022-05-05 科威阀门
-
![蒸汽主管怎么正确布置疏水点才能有效避免安全隐患知识分享-科威设备]()
-
![液压控制系统的组成及分类知识-科威]()
-
![阀门故障的十大原因知识分享-科威阀门]()
阀门故障的十大原因知识分享-科威阀门
阀门是任何加工厂固有的重要组成部分。从仪表中使用的简陋的商品阀门到最复杂的控制阀。它们都有一个目的,它们都需要花钱,它们在未来的某个时候都需要更换。众所周知,意外故障可能是更换阀门的主要原因。在本文中,我们将探讨阀门故障的前十大原因和一些缓解策略。
2022-04-29 科威阀门